|
FG Camera Library
1.7.3.0 (2026-04-13)
|
|
|
FG Camera Library
1.7.3.0 (2026-04-13)
|
|
The VisionSensor PV3 / PV4 is a compact programmable Linux camera based on the arm64 architecture. Unlike the VisionCam, it does not provide a "Real Time Communication Controller" (RTCC). Sensor trigger and the integrated LEDs are controlled by this libraray, while the digital I/Os are controlled by the VisionBox Interface Library.
The VisionSensor PV3 / PV4 can also be connected to an I/O Expansion hardware which provides additional I/Os and the "Real Time Communication Controller".
Also take a look at the Sensors page for information about available sensors for each platform.
The function FG_set_trigger_mode() is used to configure one of the trigger modes:
Example:
The VisionSensor PV3 / PV4 provides the following special features for configuration of the trigger signal:
| Property name | Description | Version requirements | |
|---|---|---|---|
| FPGA | Library | ||
| TriggerLine | Selects the trigger signal in hardware triggered mode. IN1 is not available when using FrameTriggerMode 2 and 3. 0: IN0, rising edge (default) Additional values for the VisionSensor with I/O Expansion:1: IN1, rising edge 2: IN0, falling edge 3: IN1, falling edge 4: IN0, rising and falling edge 5: IN1, rising and falling edge 6: IN0 + IN1, rising and falling edges 10: PTP Hardware Clock signal provided by Ethernet controller (VisionSensor PV4 only, not available with I/O Expansion) 100...115: VIB::Multiplexer output line 0...15, rising edge 200...215: VIB::Multiplexer output line 0...15, falling edge | ≥ 1.0.0.68 for values ≥ 2, ≥ 1.0.0.75 for values ≥ 100, | ≥ 1.3.0.0 |
| TriggerDivider | 1...65536: divider value (default: 1) | ≥ 1.0.0.68 | |
| TriggerDelay | 0...6700000: delay value in micro-seconds (default: 0)
| ≥ 1.0.0.85 | ≥ 1.7.1.0 |
Example:
If the sensor is used in Line scan / multi-scan mode, an additional frame trigger signal can be configured using the special feature FrameTriggerMode.
The operating mode of the integrated LED unit and the exposure output signal can be controlled by software:
Use the special feature StrobeMode to control usage of the exposure signal.
| StrobeMode | Integrated LEDs | Digital output OUT<i> |
|---|---|---|
| 0 | Enabled | Controlled by VIB::DigitalOutput |
| 1 | Off | Sensor exposure signal |
| 2 (default) | Off | Controlled by VIB::DigitalOutput |
| 3 | Enabled | Sensor exposure signal |
| Property name | Description | Library |
|---|---|---|
| StrobeMode | Sets the operating mode for the integrated LEDs and the exposure signal for replacing the physical mode switch. -1...3: strobe mode (default: 2) | ≥ 1.2.0.0 |
| StrobeOutput | Selects the digital output line for the external exposure signal. 0...<i>: index of digital output signal OUT<i> (default: 0) | ≥ 1.2.3.0 |
Example:
The LED current can be adjusted for the following hardware:
The LED current is controlled by the following special feature:
| Property name | Description | Version requirements | |
|---|---|---|---|
| FPGA | Library | ||
| LedCurrent | LED current in percent, the minimum value depends on the LED hardware x...100 Default value for multi-channel LED illumination unit: 100Default value for adjustable ring light: 28 (similar to non-adjustable model) | ≥ 1.0.0.70 (for adjustable ring light only) | ≥ 1.4.0.0 |
| LedDutyCycle | Returns the maximum usable duty cycle in percent (read-only) Multi-channel LED illumination unit: the content of the pointer argument must be initialized with the LED channel. | - | ≥ 1.7.0.0 |
A sequencer can be used to apply different settings to subsequent sensor frames:
The sequencer is configured using special features as follows:
The sequencer is controlled by the following special features:
| Property name | Description | Version requirements | |
|---|---|---|---|
| FPGA | Library | ||
| SequencerStepCount | Number of active Sequencer steps 1...4 (default: 1) | ≥ 1.0.0.70 | ≥ 1.4.0.0 |
| SequencerStep | Selected Sequencer step index for using the following special options: SequencerTriggerMode, SequencerFlashTime, SequencerFlashEnable 0...(SequencerStepCount - 1) (default: 0) | ||
| SequencerTriggerMode | Trigger mode for the selected Sequencer step. This setting is ignored in free run mode: 0: disable sensor trigger for this step, acquire image when the sensor is ready 1: enable sensor trigger for this step (default) | ||
| SequencerFlashEnable | LED illumination unit: a bit field for selecting active LED channels for the selected Sequencer step. 0x0...0xf (default: 0x3 - channel 0+1 for step 0, else 0x0) | ||
| SequencerFlashTime | LED illumination unit: strobe duration for the selected Sequencer step in micro-seconds. 1...16384 (default: 100) | ||
Correlation between acquired images and the used sequencer step can be done in two ways:
image_scan_count to the number of sequencer steps. The resulting image will contain the sensor images for all steps after each other.The trigger mode can be used to enable or disable the sensor trigger for each sequencer step.
The trigger is activated by default for all steps, so the sensor will wait for a trigger signal (hardware or software trigger). If the trigger mode is disabled for a sequencer step, the sensor will start acquisition as soon as the previous sensor exposure and readout has completed.
Example:
The following example configures the sequencer to capture three frames for each trigger event:
In free-run mode, the sequencer trigger mode setting affects the acquisition as follows:
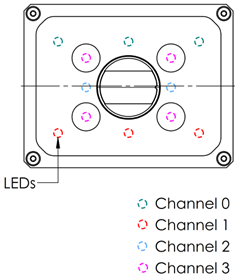
The following LED parameters can be changed for each sequencer step when using the multi-channel LED illumination unit:
Example:
The optional Liquid Lens hardware is controlled by the special feature Focus:
| Property name | Description | Library |
|---|---|---|
| Focus | DAC value controlling the Liquid Lens focus: 0...255 (default: 128) | ≥ 1.7.0.0 |
Example:
With Line scan mode or multi-scan mode, multiple frames of the selected sensor region will be concatenated into one larger destination image.
This mode provides the following benefits:
This mode is enabled by configuring the AOI with FG_set_scan_param() instead of FG_set_aoi(). The parameter image_scan_count specifies the number of sensor frames that will be concatenated into the larger destination image. A value of 1 disables line scan mode.

For line scan applications, a sensor scan height greater than one can be useful to increase the effective line rate. For example, an AOI size of 1920 x 4 and a scan rate of 10 kHz results in an effective line rate of 40 kHz. The effective line rate has to match the object speed to avoid image distortions (overlapping sensor scans or gaps between scans). This can be achieved by using a rotational encoder as the trigger source for example. The exposure time also needs to be short enough to avoid in-motion unsharpness. Exposure should not exceed the reciprocal of the effective line rate.
Example:
The following example configures a scan AOI of 1024 x 4 at the sensor's center location:
In line scan mode with hardware or software trigger enabled, each trigger event will start acquisition of one sensor frame containing the configured sensor scan height number of lines. Multiple trigger events are required before the image is complete and returned to the user.
The trigger input, edge sensitivity and a trigger divider can be controlled to adapt the the trigger signal to the desired scan rate, see Hardware trigger.
The scan height acts like a trigger multiplier for the effective line rate.
In line scan mode, an additional frame trigger can be used to start acquisition of an image. The trigger can be software based or hardware based using the digital input signal IN1. Frame trigger works independently from the sensor trigger mode. An additional frame start delay is also available.
The frame trigger is configured using the following special features:
| Property name | Description | Version requirements | |
|---|---|---|---|
| FPGA | Library | ||
| FrameTriggerMode | Sets the frame trigger mode, used for starting frames in line scan mode. 0: Don't use frame trigger, frames are captured continuously (default) 1: Frames are software triggered by using the special option FrameTrigger 2: Use rising edge on input IN1 3: Use falling edge on input IN1 Additional values for the VisionSensor with I/O Expansion:100...115: VIB::Multiplexer output line 0...15, rising edge 200...215: VIB::Multiplexer output line 0...15, falling edge | ≥ 1.0.0.68 | ≥ 1.2.9.0 |
| FrameTriggerDelay | Frame start delay after receiving the frame trigger. The number determines how many sensor trigger events are ignored after each frame trigger. 0...65535 (default: 0) | ||
| FrameTrigger | Triggers a frame in software controlled frame trigger mode (write only). Only the value 0 is valid. | ||
Example: