|
VisionCam XM2 Linux
2026-06-09
|
|
|
VisionCam XM2 Linux
2026-06-09
|
|
IMAGO also offers the following accessories for the VisionCam XM2:
A 24 V power supply must be connected to the 17-pin power and I/O connector. The device will boot automatically into Linux after applying power.
The following table shows the pin assignment of the connector:
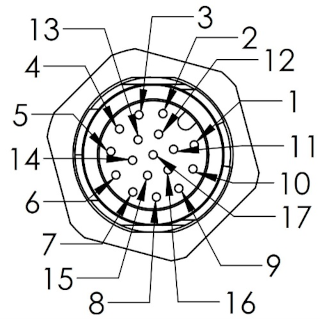
IO connector |
|
| I/O Pin 15 | I/O Pin 3/4 | D-SUB RS-232 (if present) |
|---|---|---|
| Open (default) | /dev/ttyTCU0 | /dev/ttyTHS1 |
| GND | /dev/ttyTHS1 | /dev/ttyTCU0 |
The following Linux login methods are available:
Two user accounts are pre-installed in the Linux system:
| User | Password | Description |
|---|---|---|
| root | vision | Superuser account |
| visioncam | vision | Regular user account |
The network interface of the VisionCam is configured for DHCP by default.
If no DHCP server is present, the device will fall back assigning a link-local IPv4 address after some time. The link-local address for IPv4 is in the range 169.254.0.0/16.
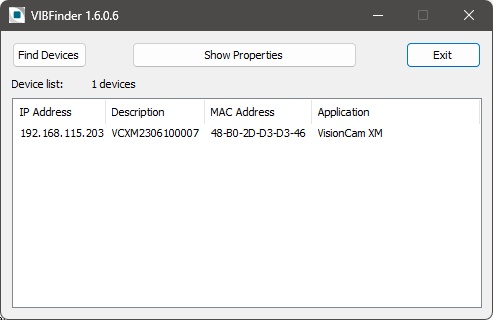
IMAGO's VIBFinder tool for Windows can be used to discover the device on the local network by using the SNMP protocol:
VIBFinder 2 supports the following additional features:
Please visit the IMAGO Download Portal for the latest version.
Instead of using the device's IPv4 address, it's also possible to establish a connection by using the mDNS host name. The name consists of the device's serial number in the domain .local.
Example:
A static IP address can be assigned by modifying the file /etc/network/interfaces. This can also be accomblished by using the RS-232 Linux console login.
The file shows some commented lines for setting a static IP address:
When using a static IP address, the file /etc/resolv.conf.tail can be created to configure a DNS server, for example:
This file is used by dhcpcd to generated the file /etc/resolv.conf.
For SSH login, the user name and the associated password are required. Defaults are shown in section VisionCam login.
The ssh program is typically used to login to a remote machine, for example:
The scp program (Secure Copy) can be used to copy files between machines, for example:
There are many programs implementing the SSH protocol. We recommend MobaXterm, which also supports copying files and a X11 server for running remote applications with display output.
Recent Windows versions also provide the optional feature OpenSSH-Client. It contains the command line tools ssh and scp, similar to Linux.
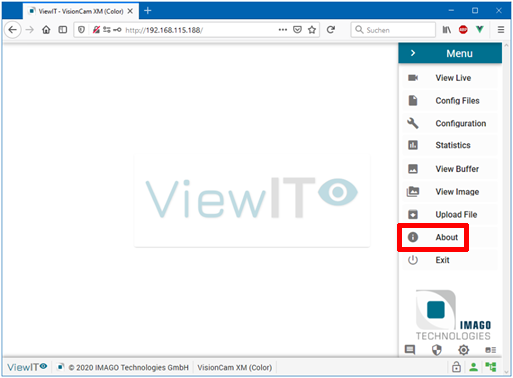
The ViewIT software provides access to the VisionCam XM / LM by using a web browser. The framework gives access to the sensor's live view, acquisition parameters, digital I/Os and allows using self-designed image processing algorithms.
ViewIT is not part of the basic Linux image, but is normally pre-installed on delivery of new devices.
ViewIT gets installed as Linux service named viewit. Depending on the configuration, the service may be enabled or disabled after booting the system. If the ViewIT package is installed, the state will be shown during console login:
In this example, ViewIT is installed but not running yet. It can be started manually by running the command 'systemctl start viewit'.
After entering the device's IP address into the address field of a web browser, the main screen appears:
The software documentation can be downloaded from the device by selecting the Help menu.